We finally know how fish swim so fast

When it comes to swimming, fish demonstrate an effortless grace and power that humans can only dream of. While the fastest fish swim at up to 70 miles per hour, no human has ever managed even 4 mph in water. Even the fastest submarines have a top speed of only 50 mph.
Exactly how fish manage this feat is something of mystery. Physicists, biologists, and engineers have long puzzled over the characteristic undulatory motion and the hydrodynamic forces it generates. Indeed, they have two theories of hydrodynamic propulsion to explain it, although they date from the 1950s and ’60s. But nobody has worked out which is correct.
Today that changes thanks to the work of Tingyu Ming at the Beijing Computational Science Research Center in China and various colleagues. These guys have modeled fish propulsion on a supercomputer and calibrated the results using detailed measurements of the motion of real fish. Their model explains for the first time how fish generate thrust and even why certain anatomical structures, like tendons, are so important.
First some background. In the characteristic undulatory swimming motion of fish, muscles contract sequentially along the body to generate a backward-moving wave of body bending. This pushes against the water and produces thrust.
But exactly how this thrust arises is something of a puzzle. In 1952, the British physicist Geoffrey Taylor considered the interaction of each segment of a fish’s body with water. His idea was that each segment generates drag, a resistance to movement. As the segment undulates, the drag is greater in a perpendicular direction to the body than parallel to it. The result is thrust in the parallel direction, or forwards. This idea is known as resistive force theory.
But in 1960, a British mathematician, James Lighthill, put forward a different idea in which the dominant effect is the inertia of the water. This allows a flat plate to generate thrust by waving with a small amplitude. This is known as elongated body theory.
The key difference between these theories is the type of force generated. For Taylor, it is resistive force, which acts in the opposite direction to movement of a body but is in phase with that velocity. For Lighthill, it is reactive force, which acts in the opposite direction to an action force and is in phase with the acceleration.
That may seem a subtle difference, but it is key to understanding fish propulsion and to reproducing it artificially. That’s why knowing which theory to use is important.
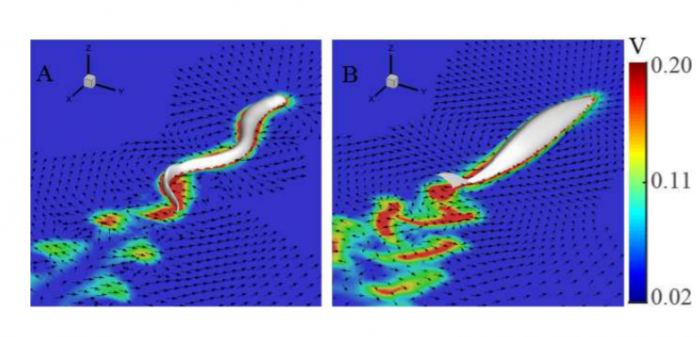
To find out, Tingyu and co created a 3D computational fluid dynamics model of two types of fish: anguilliform swimmers like eels and carangiform swimmers like mackerel. The main difference is that anguilliforms undulate their entire bodies, while only the rear half of carangiform bodies bends significantly.
The team used real studies of fish movement to calibrate their models and then calculated the force, torque, and power generated by each type of body shape.
The results make for interesting reading. It turns out that both theories are correct but for different body shapes and even for different parts of these bodies.
For example, for both mackerel-type swimmers and eel-type swimmers, resistive forces are more important in the middle part of the body, which is relatively smooth and uniform. But reactive forces play a much bigger role near the tails of mackerel-type swimmers.
Elasticity plays an important role too. Nobody has been able to measure the elasticity of fish bodies as they swim, but the consensus is that elasticity must help store energy and improve the efficiency of swimming.
Tingyu and co’s model provides some insight here too, by showing how elasticity varies with the force and power generated by the body. The researchers show how eels and mackerel must become elastic at different places in their bodies and at different points during each undulating cycle. “This observation is consistent with the findings of previous studies that suitable elasticity can save and restore energy to improve efficiency,” they say.
That raises the question of how this energy transfer occurs through fish bodies. One of the puzzling anatomical features of mackerel-type swimmers is that they have tendons that stretch along their bodies toward the tails. If each vertebra acted as an independent unit, as Taylor’s theory suggests, this kind of tendon wouldn’t be necessary.
But in the new model developed by Tingyu and co, that’s exactly what is needed. “We hypothesize that these long tendons are used to transfer energy,” they say.
That’s interesting work, and not only because it provides a detailed insight into one of the most common forms of propulsion in the natural world. It turns out that fish propulsion is far more complex than originally thought, and presumably similarly difficult to reproduce artificially.
But the work of Tingyu and co offers a way forward for bioengineers hoping to reproduce fish propulsion in artificial devices. It may one day help submarines travel faster, too. Humans have a lot of catching up to do!
Ref: arxiv.org/abs/1812.02410 : How fish power swimming: a 3D computational fluid dynamics study
Deep Dive
Biotechnology and health
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
An AI-driven “factory of drugs” claims to have hit a big milestone
Insilico is part of a wave of companies betting on AI as the "next amazing revolution" in biology
The quest to legitimize longevity medicine
Longevity clinics offer a mix of services that largely cater to the wealthy. Now there’s a push to establish their work as a credible medical field.
There is a new most expensive drug in the world. Price tag: $4.25 million
But will the latest gene therapy suffer the curse of the costliest drug?
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.