Robotic Quadcopters Could Offer Zero G Flights on the Cheap
One of the comically named triumphs of aeronautical engineering is the vomit comet—an aircraft that flies a parabolic trajectory to simulate the conditions of zero g. These planes are used by astronauts to train in weightless conditions for intervals of around 25 seconds and by people who simply want to experience zero g. The planes have had other users, too—the weightless scenes in the movie Apollo 13 were all filmed inside a vomit comet at zero g.
Vomit comets are also one of the options available to scientists to carry out experiments in microgravity conditions. But vomit comets are not cheap, costing up to $3,000/kilogram; and they need to be booked months or years in advance, so repeating an experiment that has somehow gone wrong can often be difficult.
Another option is a drop tower. These have a quick turnaround and are straightforward to book. But they are prohibitively expensive in the first place.
And the final option—a flight on the International Space Station or a bespoke spacecraft—is prohibitively expensive for almost everyone.
So scientists would dearly love to have a cheaper and quicker alternative, at least to test proof-of-principle designs before embarking on more expensive options.
Today they have their wish, or close to it, thanks to the work of Juan-Pablo Afman and pals at the Georgia Institute of Technology in Atlanta. These guys have come up with the idea of using an autonomous quadcopter to create zero g conditions for short periods. Their solution is highly flexible, easily repeatability, and above all low-cost.
Their goals are easy to state. They want at least five seconds of free fall, to operate within regulatory constraints and to do all this with a system costing less than $25,000.
That’s not quite as easy as it sounds. Afman and co quickly found that flying a quadcopter to a great height and switching off its motors does not generate zero g because of air resistance during the drop.
Even worse, the forces at work on the rotors generate severe instabilities that make it hard for the vehicle to recover, even when the motors are switched back on. “Since the thrust forces are nearly zero, the vehicle is incapable of retaining proper attitude during the maneuver and the results are catastrophic,” they say.
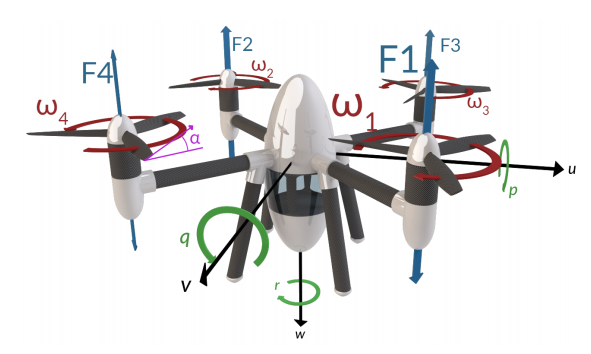
The problem is that the kind of fixed-plane rotors that are standard on most quadcopters cannot produce the forces necessary to maintain zero g or to stabilize the craft during free fall. So the team had to come up with its own variable pitch rotor design to give it control over the craft in six degrees of freedom at all times.
There are regulatory constraints, of course. One the most significant is that quadcopters cannot be flown above about 120 meters in Europe or the U.S. Nor can they weigh more than about 25 kilograms, which limits the experiments they can carry.
But that still allows the team to design trajectories that produce zero g for up to five seconds while keeping full control of the vehicle.
For safety, the team also defines a geographical volume of space inside which the quadcopter must stay at all times. This is defined by how far the vehicle would travel ballistically if it lost power at any time. They call this a “geofence,” and it guarantees relative safety.
The team has also created the software that allows users to design trajectories with different zero g time profiles for specific experiments.
Despite an impressive amount of preparation work on the ground, the team has yet to perform any zero g flights, mainly due to delays with rotor design. We’ll just have to see how well the device performs—they promise to carry out some zero g flights at the end of 2016.
In the meantime, the work is a promising step forward for zero g research. The system’s price tag makes it accessible to a wide range of institutes and perhaps even to schools. That should herald a new interest in experiments without weight and one that can be achieved with little or no vomit at all.
Ref: arxiv.org/abs/1611.07650: On the Design and Optimization of an Autonomous Microgravity Enabling Aerial Robot
Keep Reading
Most Popular
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
What’s next for generative video
OpenAI's Sora has raised the bar for AI moviemaking. Here are four things to bear in mind as we wrap our heads around what's coming.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.