The Hyperloop Pod Squad
On a blazing-hot Saturday in May, 20 engineering students walked into MIT’s Edgerton Center and breezed right past a sleek solar car. Throughout the day, no one even glanced at a marvel once hailed as a revolution in transportation. Instead, their attention was focused on something even more astonishing—a vehicle with the potential to make the solar car look as primitive as a Ford Model T.
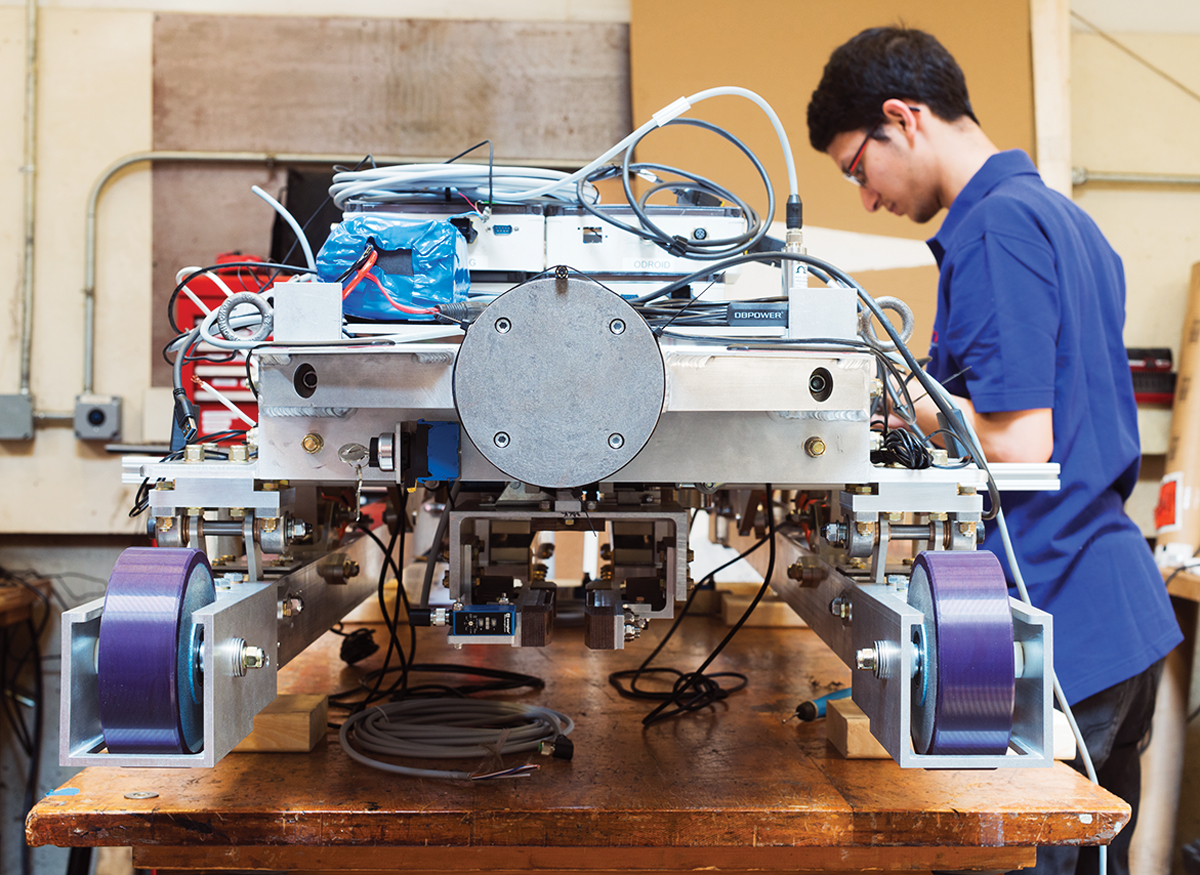
All eyes stayed fixed on a small table holding the culmination of almost a year’s worth of work: an eight-foot-long metal frame atop long aluminum skis with tiny wheels on both ends. As competitors in the SpaceX Hyperloop Pod Competition, the students were putting the finishing touches on a small-scale prototype of the pod they’d designed to whiz passengers and cargo through a vacuum tube in a high-speed ground transportation system envisioned by entrepreneur and SpaceX CEO Elon Musk. All the team needed to do to finish was connect some wires, test a few sensors, and attach a protective carbon-fiber covering. Then the pod would be ready for its first high-speed test run, slated for January 2017, when it will be shot down a custom-built track at 240 miles per hour while SpaceX engineers judge its performance.

When SpaceX announced its Hyperloop Pod Competition in June 2015, a mention of the contest in MIT’s Graduate Career News e-mail caught the eye of Sabrina Ball, SM ’16. Within 24 hours, Ball and six fellow mechanical engineering students had chucked their plans to spend the upcoming year working on wind turbines. They started recruiting a student team that could create a preliminary design by mid-fall, present it at year’s end, and build a test pod for a competition demo six months later.
“We knew that with such a short turnaround, from nothing to a design pod that’s built in nine months, we needed people who had at least a basis of skills,” says John Mayo, SM ’16, project manager for the MIT Hyperloop Team and one of its founding members. “They couldn’t be picking up how to draw in CAD or how to use a machine without previous experience. We just didn’t have time for that in our schedule.” They were soon joined by another team of three aero-astro grad students who had already banded together to tackle the challenge. The group quickly grew to about 20 and got to work.
The original $6 billion Hyperloop concept outlined by Musk in 2013 proposed floating an aluminum passenger-carrying pod on air bearings—“like an air hockey table flipped over,” Mayo says—and shooting it through a steel tube from which nearly all the air had been vacuumed out to create air pressure about one-thousandth the standard atmospheric pressure at sea level. The way the pod hovered above the track would virtually eliminate friction and the low-pressure environment would reduce drag force, letting the pod, in theory, cruise along at up to 760 miles per hour, just under the speed of sound. Musk had imagined that solar-powered motors built into the tube would use magnetic fields to periodically accelerate the pod, which would then coast in a nearly frictionless and drag-force-free environment, allowing passengers to make the 382-mile trip from Los Angeles to San Francisco in about half an hour.
At the outset, the MIT Hyperloop team assumed that the track would be designed around Musk’s original plan and would only allow for an air-bearing system. They began developing a pod with air bearings, but they encountered serious power consumption issues and were concerned that the bearings wouldn’t suspend the pod high enough to clear bumps and divots in the track.

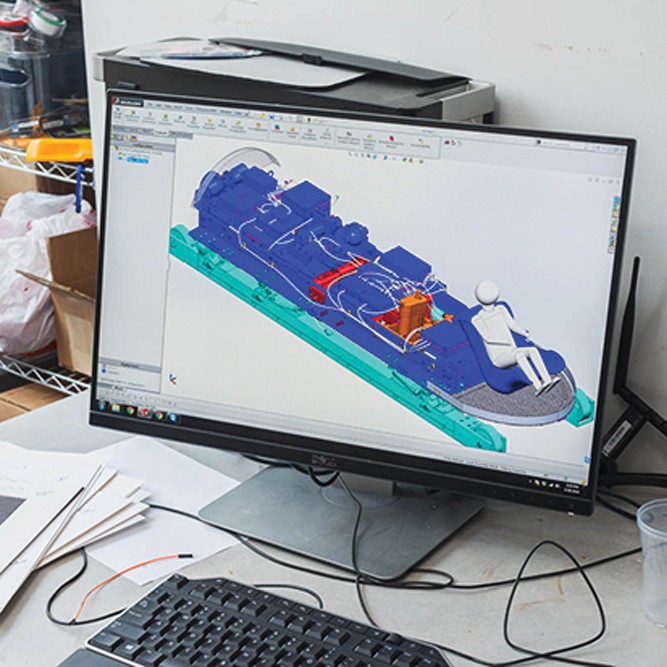
middle: A CAD drawing of the pod.
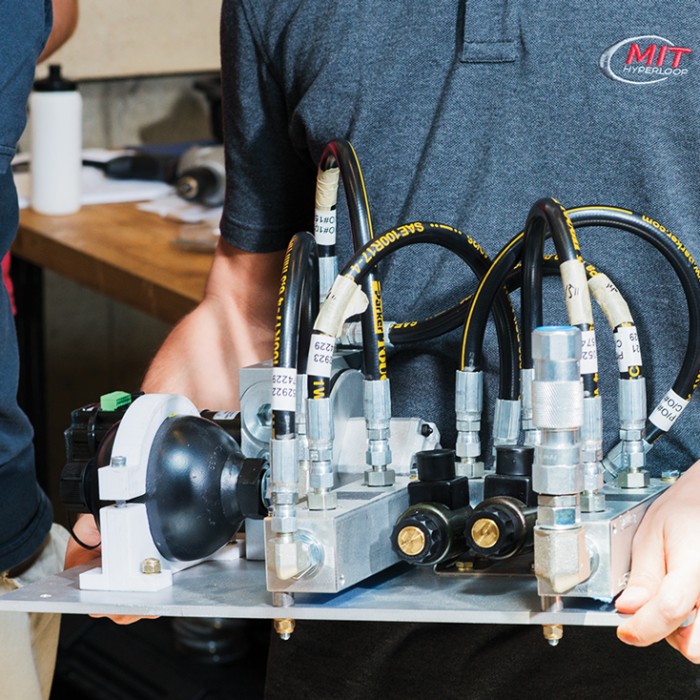
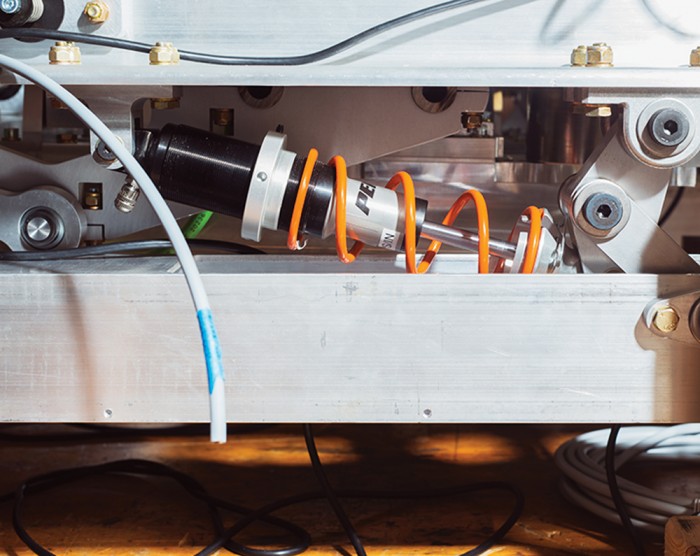
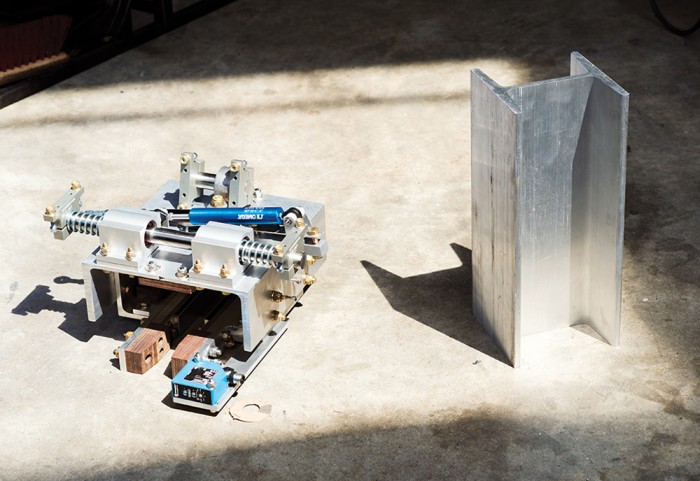
right: Raghav Aggarwal, who was in charge of brakes design, holds the hydraulics plate for the braking control.
middle: A CAD drawing of the pod.
right: Raghav Aggarwal, who was in charge of brakes design, holds the hydraulics plate for the braking control.
middle: A CAD drawing of the pod.
right: Raghav Aggarwal, who was in charge of brakes design, holds the hydraulics plate for the braking control.
“Air bearings that you buy off the shelf typically have gap heights of like 10 to 100 microns,” says Derek Paxson, SM ’16, one of the three original aero-astro grad students on the team. “To make those work, the surface that they ride on has to be four times flatter than that. You have to have imperfections on the order of singular microns, which are very, very small. It’s really impractical to do that on a large scale.”
But when SpaceX released the test track specifications in October, the students realized that they might not need to rely on air bearings. The track would be made of a conductive aluminum alloy that could be magnetized, so they could also consider magnetic levitation, a system that can already get trains to about 375 miles per hour without a depressurized tube. Maglev would allow for larger gap heights and cut down on power requirements. But did it make sense to scrap the air-bearing plan they’d spent months creating?
They spent two weeks evaluating the pros, cons, and feasibility of both approaches, then decided to design a maglev system that keeps the pod floating 15 millimeters above the track. They equipped the bottom of the pod with two 80-inch-long magnetic skis made of several smaller magnets with alternating polarities. As the pod moves over the track, the magnets create changing magnetic fields, inducing electrical currents that flow in loops. These so-called eddy currents produce their own magnetic field, which repels the one produced by the magnets and pushes the pod upward. No motor is needed to keep the pod floating as long as it’s moving at five meters per second or faster. In the competition, a SpaceX vehicle will push the pods for the first 1,600 feet. That should accelerate MIT’s 268-kilogram pod to about 100 meters per second, allowing it to coast the rest of the way on its own.
Switching designs required the entire crew to go from knowing almost nothing about maglev to becoming experts. Since they’d reached the decision in early November, they had about 10 weeks to finalize the design. “It was a pretty quick 180,” says Paxson, who now works at the transportation startup Hyperloop One, one of the team’s sponsors.
The abrupt change paid off. Last January, the MIT team won Best Overall Design in the design stage of the competition, defeating 123 other teams from around the globe. The students then got busy building their prototype, finishing well ahead of the demo scheduled for August. But other contestants wanted more time, so SpaceX pushed the testing of pod designs to January 2017, when 22 teams will travel to the SpaceX campus in Hawthorne, California, to send their prototypes down a nearby one-mile test track at up to 240 miles per hour.

In the meantime, the MIT competitors have created computer models to virtually test the pod’s performance. They simulated an endless line of track by mounting an aluminum disc onto a motor to make it spin. By placing magnets similar to those on the pod close to the spinning disc, they can measure the lift and drag force generated, gathering real-world data for their computer models. Test results look promising. “We were within about 5 percent of the predicted values, which makes me feel confident that this is actually going to work,” says Ball, who worked on the vehicle dynamics team and built a significant part of the pod’s lateral controls. “I think we’re riding pretty right now.”
This January, even if the MIT pod reaches 240 miles per hour, brakes gracefully before hitting a foam pit at the end of the test track, and claims competition victory, the pod will still be a long way from Musk’s original vision. The competition pods, after all, aren’t made to full scale or designed to carry real passengers. But team members are optimistic.
“It’s almost certain that the engineering behind a hyperloop could happen. The technology behind it is fully possible,” says Mayo.
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.