Robo Swarm
A collective of 100 robots was considered huge until Radhika Nagpal ’94, SM ’94, PhD ’01, taught more than 1,000 of them to act together.
In March of this year, Harvard University computer scientist Radhika Nagpal and her colleagues hiked 10 miles a day through a tropical island in the middle of the Panama Canal, searching for army ants. The insects work together in groups of tens or even hundreds of thousands to protect their queen and larvae, using their own bodies to create and maintain a temporary nest. But there is no leader among them, no foreman or chief. The creatures create these complex structures as a collective.
On the morning of the second day, Nagpal had been searching for hours when Mike Rubenstein, a roboticist at Northwestern University, accidentally stepped on a rotten log. His rubber boot went right through the wood. Immediately, Nagpal rushed over to watch the swarm of insects repair their damaged nest. “She was beaming,” recalls biologist Simon Garnier of the New Jersey Institute of Technology, the expedition’s lead scientist. “Sometimes I wish my own students were more like this.”
Nagpal was in Panama to learn from the ants—or at the very least draw inspiration. As a leader in the emerging field of swarm robotics, or collective artificial intelligence, she straddles multiple fields, including mechanical engineering, industrial design, and even behavioral biology. Before designing robots that work together to build simple structures, she and her colleagues traveled to Namibia to study termites up close, and the trip to Panama launched a new project inspired by army ants. (“The number of actuators an ant has makes a roboticist want to cry,” she says.) But her lab is best known for building a group of 1,024 simple, identical, low-cost machines she calls kilobots. The squat, cylindrical robots carry out basic tasks as a group. There is no leader among them. There’s no human interference, either. They are a true artificial swarm.
The potential applications for robot collectives vary widely, from robo-bees for search and rescue work to autonomous construction vehicles that could build habitats on the moon or Mars in advance of manned missions. But these futuristic visions aren’t what drive Nagpal. “At one level, yes, this may lead to applications, but it’s also about scientific discovery,” she says. “The point is to be able to discover new knowledge, and to not necessarily know how that is going to influence humanity 20 years down the road.”
Nagpal’s research has been featured on the cover of Science and Nature, and in 2014 she was cited as one of Nature’s 10, an annual list of people who matter in science. “She’s certainly a brilliant scientist,” adds Garnier. “But also she never lost the curiosity of children.”
Finding her own path
Nagpal, 45, was raised in India, which she describes as a country where intelligence in girls was unappreciated and even problematic. “As a smart girl growing up, it was made very clear that they would rather have had the boys be smart,” she recalls. Girls were supposed to learn how to cook, not code. And if a girl did excel academically, medicine was one of the few acceptable paths.
So Nagpal decided that anything even remotely linked to medicine, such as biology, was off limits. “My whole strategy was escape,” she says. “If there was a predestined path for women, I was not going to go down that path, just for fear of being locked into that system and never being able to make another decision on my own.”
Despite the cultural norms, Nagpal’s parents—her father is a mechanical engineer who got his PhD at Georgia Tech—allowed her to attend MIT. As a freshman, she took advantage of the pass/fail grading system to enroll in the introductory computing class 6.001. “I thought it was going to be hard,” she says, “but then I loved it.”
As a grad student in 1996, Nagpal read “Amorphous Computing,” a newly published white paper in which her advisors, Harold Abelson, PhD ’73, and Gerald Jay Sussman ’68, PhD ’73, and others described an unusual direction for computer science. They focused not on individual, powerful computers but on “programmable multitudes” made of simple machines that, when working together, could produce complex results. Though existing technology was not ready to support the vision, the concept became the basis for her PhD studies.
As she advanced, married, and started a family of her own, Nagpal refused to let her career squash her other passions: painting, dance, and generally living a full, balanced life. After landing a junior faculty position at Harvard in 2004, she neglected academic politicking, declined to engage in all-night lab sessions, and made it a policy not to check e-mail on weekends. These decisions, detailed in a 2013 Scientific Americanblog post called “The Awesomest 7-Year Postdoc or: How I Learned to Stop Worrying and Love the Tenure-Track Faculty Life,” resonated inside and outside academia. One of her colleagues predicted that her post would probably be her most widely read work. Yet Nagpal still managed to earn tenure and the opportunity to mold her ideal lab—a balanced, diverse collective capable of the sort of leaderless interactions she studies in nature, yet still open to guidance and instruction from a certain well-rounded professor.
Creating a kiloswarm
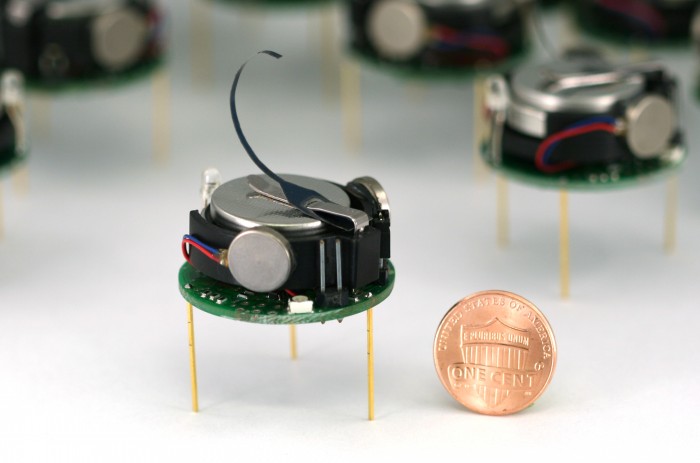
Recently, almost two decades after she’d read his white paper, Nagpal invited Abelson to her lab to see the amorphous computer made real in the form of the 1,024 kilobots. Each robot stands on three paper-clip-thin metallic legs and is small enough to hide in your enclosed hands. They move when two small motors—the kind that make smartphones vibrate—are activated, causing the bots to slide across smooth surfaces; they communicate with each other by bouncing infrared signals off the floor. They don’t even have a power switch, since that would have meant spending an hour just turning them all on. Instead, the scientists made a wand that transmits an infrared signal instructing the robots to power up or down.
When Nagpal and Rubenstein, her postdoc at the time and her main collaborator on the project, set out to build their kilobot swarm, the field was so young that the largest collective her group had constructed was three machines. “Nobody had a thousand robots,” she recalls. “A hundred was considered a very, very large number. Getting to a thousand seemed like an impossible task, but at the same time, you felt like if you did, then you would learn something that you couldn’t possibly have learned any other way.”
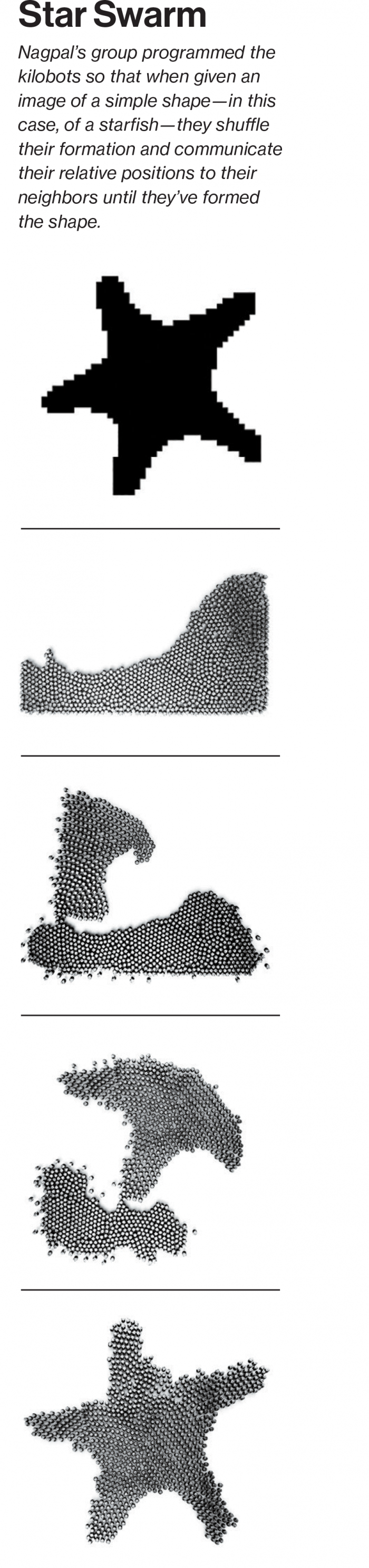
One of the first lessons was that while certain algorithms worked perfectly well with scores of robots, using these programs with a far larger number revealed flaws. Although they were designed to be exactly the same, some of the robots are slightly faster or slower, and when Nagpal and the group ran a self-assembly program, during which the swarm was supposed to transform itself from an amorphous blob into a given shape such as a wrench or a starfish, a single lagging bot was a major problem. “Every slow robot or every misbehaving robot was a traffic jam and could bring the whole system down,” she says. Yet these outliers did not create such problems in smaller collectives of less than 100 robots.
Generally, Nagpal learned that both variation—slow and fast robots, for example—and rare errors, such as a kilobot that simply stopped working, were natural features of a large system. When you ran a thousand robots for several hours, some were going to go at different speeds, and some were going to break. This wasn’t a huge surprise; she’d seen the natural equivalent in Namibia and elsewhere. Individual insects often behaved differently, marching briefly in the wrong direction, yet the collective still functioned. So instead of trying to build perfect machines or edit the algorithms, she decided to develop a second set of algorithms that correct errors and variations. Now, if a kilobot malfunctions, its neighbors will order it to either reboot or, if that fails, declare itself dead. The latter strategy is the swarm equivalent of switching on your hazards on the highway and telling everyone to drive around you. It works: among other tasks, the kilobots can be programmed to self-assemble into specific shapes without any intervention from the researchers. In a separate effort, Nagpal and her colleagues built a small collective of more complex robots that collaborated to build basic structures. This was the project that sparked the trip to Namibia. The researchers had planned to have their robots build with solid, geometric foam bricks until they saw termites in Namibia building with bendable, compliant clay. When they got back to the lab, they decided to build additional robots that would move sandbag-like materials and amorphous foam. Yet the trip also had a motivational purpose. “The other influence was just being re-amazed and re-energized about how effective collective intelligence can be,” she says.
Nagpal hopes the Panamanian expedition will have the same effect on her next project—a kind of hybrid of the kilobots and the construction robots. Her plan is to design robots that behave like army ants, using their own bodies as the basic construction materials. The goal is a difficult one, and Nagpal acknowledges the grandiosity of the task. Yet she has made it a rule to reach past the plausible. “Our dreams are often beyond the bounds of what’s possible,” she says. “But it’s also true that the halfway point to the dreams is still pretty cool.”
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.