A Gentler Robotic Touch
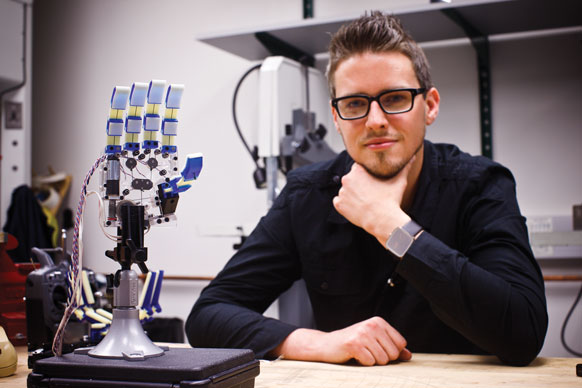
Inside a new lab at Yale University, a researcher flips a switch, and a robotic hand contracts its four blue-and-white plastic fingers to clutch a football. The researcher takes hold of the base that the hand is attached to and gives it a shake to demonstrate how firm the grip is; then he flips the switch again, and the hand lets go. He moves on to a series of objects scattered on a lab bench, demonstrating how the gripper can in quick succession pick up a telephone receiver, a power drill, and a block of wax.
Engineering robots to grip such random objects has been remarkably difficult. Robotic hands are typically designed with dozens of joints controlled by several independent motors. Coördinating the motors involves complex algorithms that consume lots of computing power, and often robots can pick up only objects they have been programmed to recognize.
But the new hand, designed by Aaron Dollar, an assistant professor of mechanical engineering at Yale, is a study in simplicity. A single motor controls the whole hand by reeling in thin black cables that run through the fingers like tendons. As the motor pulls the cables, the fingers curl around an object much as human fingers would. Unlike conventional robotic hands, which are rigid and made of metal, the plastic fingers have rubbery joints that make them flexible, so they can easily conform to just about any object without damaging it. The controls required for this setup are no more complicated than an on-off switch. “If you design the hardware properly, the software problems become simpler,” Dollar says. Indeed, he says, “all you have to do is get close to an object and pull a cable.”

Dollar’s lab has made a range of designs, including the four-fingered model and a more humanlike five-fingered hand with a thumb that can be positioned for different grips. By simplifying robotic hands, Dollar hopes to make robots less expensive and more adaptable. That could help lead to practical robotic assistants that are safe enough and deft enough to operate outside the highly regulated environment of a factory floor. It could also give rise to cheap and versatile prosthetics.
Making Fingers
Each finger in the hands is made of three materials: a hard plastic that plays the role of the bones in a human finger, a rubbery plastic that acts as the joints, and a spongy plastic for the finger pads. Ordinarily, making plastic devices involves forming the individual parts in separate molds and then gluing, screwing, or snapping them together. In Dollar’s process, each finger emerges fully assembled from a single block of wax, with all the pieces bonded firmly together. That makes the fingers very durable, he says.

Graduate student Joseph Belter starts the process by taking a computer design for a finger and entering its three-dimensional coördinates into a computerized mill. He secures a block of blue wax to a movable platform under the mill’s drill bit. Motors move the platform under the high-speed mill, which precisely carves out the three-dimensional shapes. These will serve as forms for the hard plastic.
Once the mill is finished carving, the researchers place sensors or other components in the mold in preparation for filling it with liquid plastic; when the plastic hardens, the components will be embedded in the finger. For example, the fingers can be equipped with touch sensors to signal a computer that an object has been successfully grasped. This time, Belter adds only a thin metal rod. When he’s finished casting the plastic, he’ll remove the rod, leaving behind a raceway for the cable that controls the finger.

Belter mixes liquid resin and hardener under a laboratory hood to create the first plastic, a blue polyurethane material. He pours it into the mold, where it flows around the metal rod. After the plastic cures and hardens overnight, he puts the block back into the mill to carve the molds for the remaining parts of the finger: the joints and the finger pads.
Belter mixes two polymers for these molds, this time varying the resin and hardener to make a rubbery plastic and a softer one. The latter will produce a spongy–almost sticky–finger pad that gives the robot fingers a good grip.
Once these polymers have cured, Belter trims off any plastic that overflowed the molds. He then cuts slits into the wax and pries it away from the plastic that makes up the finger. He slides out the metal rod he embedded earlier and threads a thin black cable through the tunnels left behind. Later, he’ll attach several fingers to a base rigged with pulleys that guide cables from the fingers to the motor that will control the hand.
The process is faster and cheaper than fabrication methods typically used for research robots, Dollar says. That means researchers in his lab are able to quickly test many versions of the robotic hand. One of the finished prototypes, a five-fingered hand, can perform four types of grasping motions, all under the control of one motor: it can turn a key or a knob, grab a dumbbell, gently pick up small objects with the tip of the thumb and forefinger, or combine these grips for oddly shaped objects. That versatility could make the hand useful for prosthetics.
The robotics industry is showing interest in Dollar’s innovations: Barrett Technology has licensed the technology and announced plans to make a commercial version of the hand available in 2011. This could be the first step toward a new generation of robots that are simple and adaptable enough to operate not just in factories but in the chaotic real world.
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.