Watch This Self-Flying Quadcopter Land on a Car Traveling at 50 Kilometers an Hour
One of the great potential applications for automated drones is parcel delivery. But their limited range makes this challenging. So one idea is to carry drones on delivery trucks and use them to make the delivery over the last half mile or so and charge them when they get back. The drone would take off from the truck carrying a parcel and return after making the drop.
The ability to take off and land on the vehicle while it is moving would make this particularly attractive. Such a delivery truck need never stop during its round.
Taking off from a moving vehicle is straightforward—it is generally equivalent to taking off on a windy day. But landing is a different story and raises an interesting question. Is it possible for an autonomous drone to land on a moving vehicle?
Today we get an answer thanks to the work of Alexandre Borowczyk and pals at the Mobile Robotics and Autonomous Systems Laboratory in Montreal. They've used low-cost sensors to build a simple system that allows an autonomous drone to land on a moving vehicle.
The system consists of a landing pad marked with a 2-D bar code called an AprilTag and fitted with a mobile phone that broadcasts its GPS coordinates and any changes in motion.
The quadcopter is fitted with its own GPS unit and inertial measurement unit and so has a good idea of where it is in 3-D space. It also has a gimballed camera and an onboard chip for processing the images and plotting trajectories.
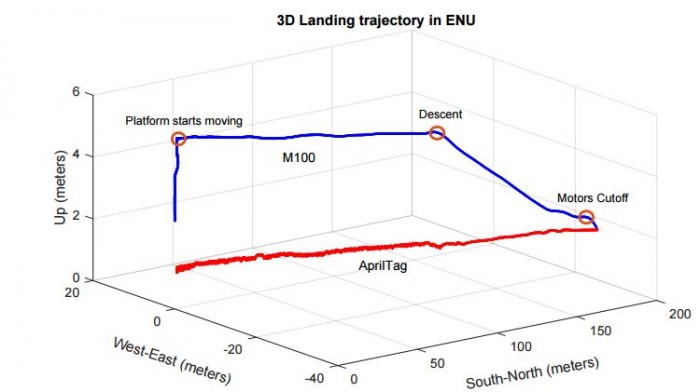
The landings occur in two phases. In the first, the quadcopter plots a trajectory to the ground vehicle using its own and the vehicle’s positions.
In the second phase, it uses its onboard camera to locate the bar code on the landing pad and then uses this to navigate and land on the pad on the roof of the vehicle.
The results speak for themselves. Borowczyk and co have used their system to land an autonomous quadcopter on a vehicle moving at 30 km/h, 40km/h, and even at 50 km/h (see video). “We demonstrate experimentally automatic landing of a multirotor MAV on a moving ground vehicle traveling at the highest speed to date, with successful tests carried up to a speed of 50 km/h,” they say.
That’s impressive work that adds yet another brick to the infrastructure that could make drone deliveries possible sooner rather than later.
Ref: arxiv.org/abs/1611.07329: Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Google DeepMind’s new generative model makes Super Mario–like games from scratch
Genie learns how to control games by watching hours and hours of video. It could help train next-gen robots too.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.