A Drone with a Sense of Direction
Commercial drones are starting to be used for tasks like inspecting oil rigs and crops. But they still require a highly skilled human pilot, and even those that are semi-autonomous usually use prebuilt maps or access the data over a wireless link.
Researchers from the Swiss Federal Institute of Technology in Zurich are making drones more independent. They have demonstrated a small drone that can build its own 3-D map of an unfamiliar environment with minimal help from a human operator, and then plan its own routes around a space and its obstacles autonomously.
“This is the first time we can show full mapping, relocalization—finding the drone on the map—and planning on board,” says researcher Michael Burri, who worked on the project. The combination of software and sensors could make it easier to deploy drones for tasks like inspecting an oil rig, he says. A company would need to do one manual flight to have a drone build its map. For subsequent inspections, the drone could do the job autonomously.
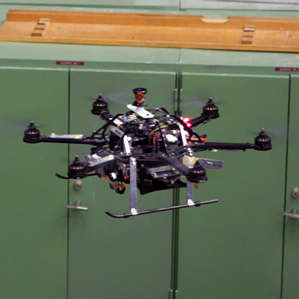
The Zurich team used a small quadrotor that weighs 1.6 kilograms, the AscTec Firefly, and equipped it with a stereo camera and sensors that report velocity, orientation, and gravitational forces. They tested their software by flying inside a former industrial site, a challenging setting featuring large ducts and other industrial equipment.
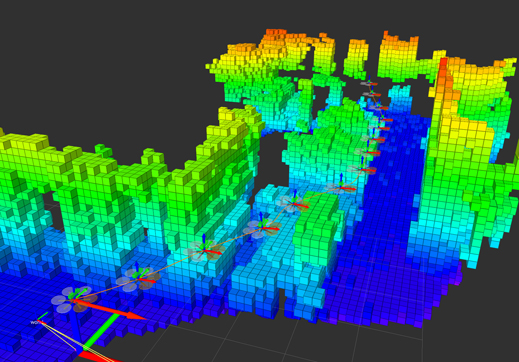
The drone needs some human help to get started in a new space. While an operator helps it make an exploratory flight around the new environment, the drone’s software builds a 3-D map by comparing data from its motion and orientation sensors with images from its camera.
Depth images from the camera are used to create a 3-D map; places the drone can’t fly are blocked out (see video). Once the map is complete, the drone can plan the most direct route possible to any target destination, flying around any mapped obstacles.
The individual mapping and sensor techniques have been demonstrated before, but not all together on an autonomous drone, says Wolfram Burgard, a professor at the University of Freiburg, Germany. “This brings the technology closer to real-world application in inspection and surveillance tasks,” he says. A paper on the new system was presented at the International Conference on Intelligent Robots and Systems last month. Burgard was editor-in-chief of the paper review board.
However, fitting all those mapping abilities into a small drone comes at a cost. With the computer and sensors, the drone used in the experiments could stay in the air for only seven minutes, as opposed to 15 minutes without the extra weight. Burri says that improvements to drone designs mean that this isn’t a significant problem, and that newer drones on the market could manage a flight time of around 20 minutes with the same payload.
He and the other researchers are now working to give their drone the ability to avoid collisions with moving objects that don’t appear on its map—for example humans or moving equipment.
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Google DeepMind’s new generative model makes Super Mario–like games from scratch
Genie learns how to control games by watching hours and hours of video. It could help train next-gen robots too.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.