A Transformer Wins DARPA’s $2 Million Robotics Challenge
A diminutive, 200-pound silver humanoid robot from South Korea called DRC-Hubo claimed first place on Saturday afternoon in the DARPA Robotics Challenge by rising awkwardly from four wheels and ascending several metal stairs with a series of slow, halting steps.
Thousands of spectators, packed into the grandstand at the Fairplex in Pomona, California, cheered and applauded the robot as it climbed under the control of a team of researchers from the Korea Advanced Institute of Science and Technology (KAIST).
The triumph of team KAIST can be seen as a victory not only for South Korea but for an adaptable approach to robotics. Hubo can turn itself from a humanlike form into a four-wheeled vehicle, using a pair of wheels attached to its knees. The latter mode provides static balance that allowed the robot to roll around quickly instead of having to walk carefully on two legs. The prize for first place was $2 million.
“My robot does have a very unique feature—he can transform,” said Jun Ho Oh, director of the Humanoid Research Center at KAIST and the inventor of Hubo, at the end of the contest. “He can walk as a bipedal or roll with knees. We can take advantage when we need walking, or other times use wheels.”
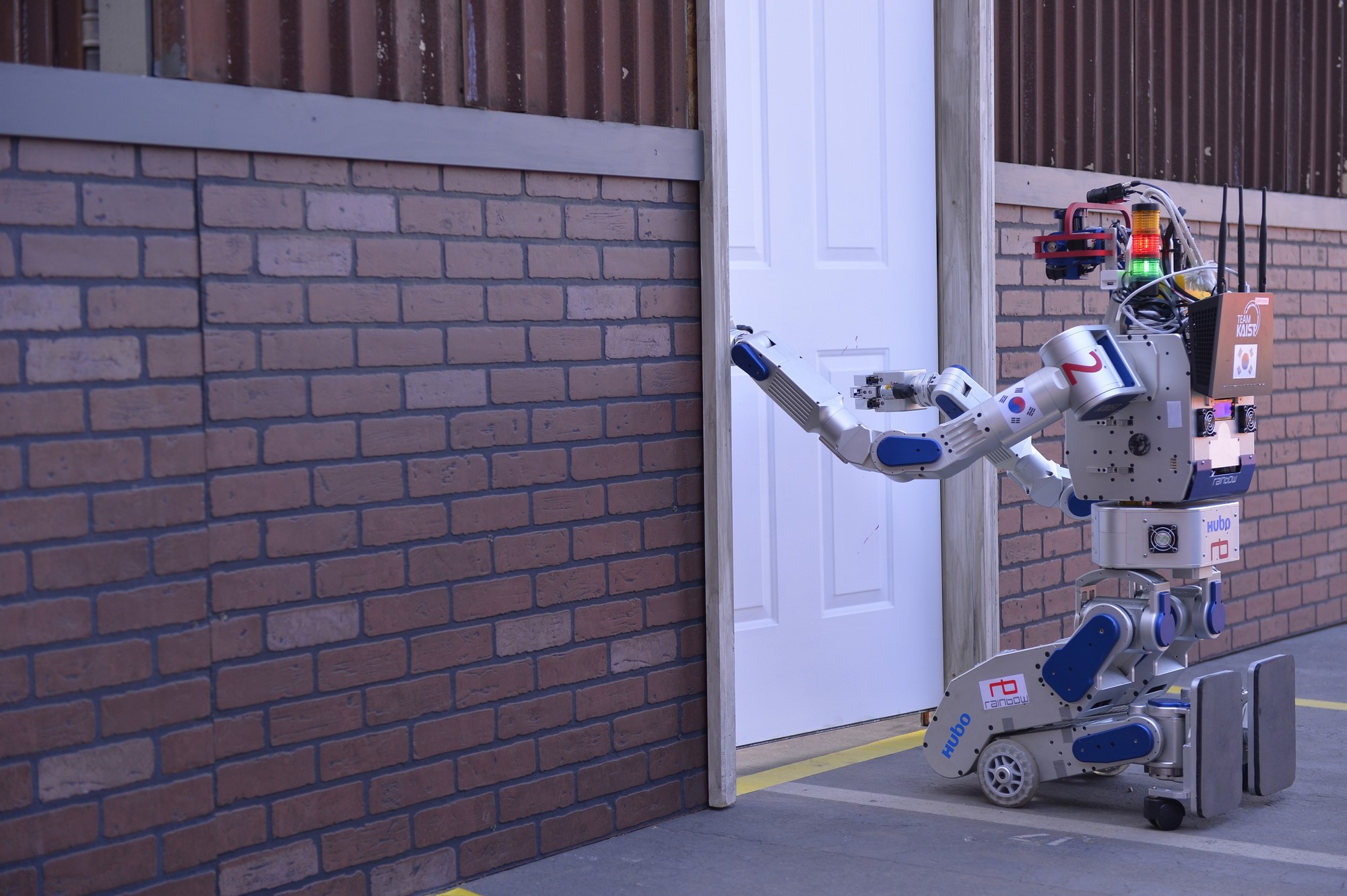
DARPA’s two-day competition pitted two dozen robot teams against one another with a series of tricky tasks in an outdoor obstacle course: driving and getting out of a buggy; opening a door; turning a valve; either pulling a lever or removing and reinserting a plug; climbing over or moving some debris; and climbing a set of steps. While each of these chores would be simple enough for most humans to do, the precise combination of sensing, planning, and motion required make them difficult for robots, even under the partial control of human operators located in a garage a few thousand feet away.
Teams scored points during the contest by completing as many tasks as possible within an hour, and they also competed to finish as quickly as possible. The hypothetical setting for the challenge was a meltdown at a nuclear power station; a scenario inspired by the 2011 disaster at the Fukushima-Daiichi power plant in Japan.
The contest included a surprising amount of drama for the crowd, despite the fact that it took some robots many minutes just to open a door. Several robots stumbled and fell while attempting tricky maneuvers or manipulations, sometimes causing serious damage to their sensors or limbs. Each tumble was accompanied by gasps from the crowd, and it served as a painful reminder of just how difficult it still is for robots to work in messy human environments.
The machine that finished second to Hubo was a powerful and sophisticated humanoid machine called Running Man that was operated by a team from the Institute of Human Machine Cognition (IHMC) in Florida. The IHMC robot was one of several identical robots made by Boston Dynamics, a company that was acquired by Google in 2013.
Besides DRC-Hubo, several nonhumanoid robots performed well at the event. One was Chimp, from Carnegie Mellon University, which finished third overall. Chimp has four legs but also has tank-like tracks, so it can drive around on all fours but also rear up on its hind legs to perform manipulation tasks with a pair of grippers on its front two limbs. Momaro, a robot from the University of Bonn in Germany, which has wheels at the end of four legs, and a further set of arms, finished fourth overall, while Robo-Simian, developed at NASA’s Jet Propulsion Laboratory, has wheels on the end of four long, multi-jointed limbs that made it look like a giant insect or crab as it moved along the course.
This doesn’t mean that a legged or humanoid approach is flawed. KAIST’s success partly reflects the design of the challenge, whereas real disasters might well benefit from legs that would allow a robot to climb or leap over obstacles. “The jury’s still out,” Gill Pratt, the DARPA program manager in charge of the contest, said when asked which approach was best. “Adaptation may be the most useful thing.”
Chris Atkeson, a member of a team comprised of researchers from Worcester Polytechnic Institute and CMU, said that “leg-wheel hybrids” would be preferable in manmade and flat environments. “I think we’ll see a whole spectrum [of robots], from cars which are totally wheeled to leg-wheel hybrids, to things where you may still have wheels but the legs play a primary role,” he said.
For many roboticists at the event, the highlight was a moment during the first day when CMU’s robot, Chimp, fell over while trying to get through a door but then managed to get up again. No other robot was capable of such a feat, and it is something that would undoubtedly be needed in a real disaster scenario. “To be a disaster robot, [a robot] must be free from disaster himself,” KAIST’s Oh said. “That’s what I learned here.”
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Google DeepMind’s new generative model makes Super Mario–like games from scratch
Genie learns how to control games by watching hours and hours of video. It could help train next-gen robots too.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.