Toothbrushes, BristleBots, and the Nature of Intelligence
The collective behaviour of insects is one of the wonders of nature. In particular, many species of termite somehow join forces to create the most extraordinary mounds–complex structures with interconnecting tunnels and caverns that can stretch underground over many tens of metres.
How they organise this behaviour is one of the great mysteries of modern science. Various theories propose that the behaviour emerges from the way insects communicate with each other or even from a kind of social intelligence.
Today, Luca Giomi and pals at Harvard University in Cambridge provide a hint that the answer could be much simpler and significantly stranger even than that. They say complex collective behaviour emerges from the mechanics of moving through an environment. In other words, no special communication, social rules or group intelligence is required.
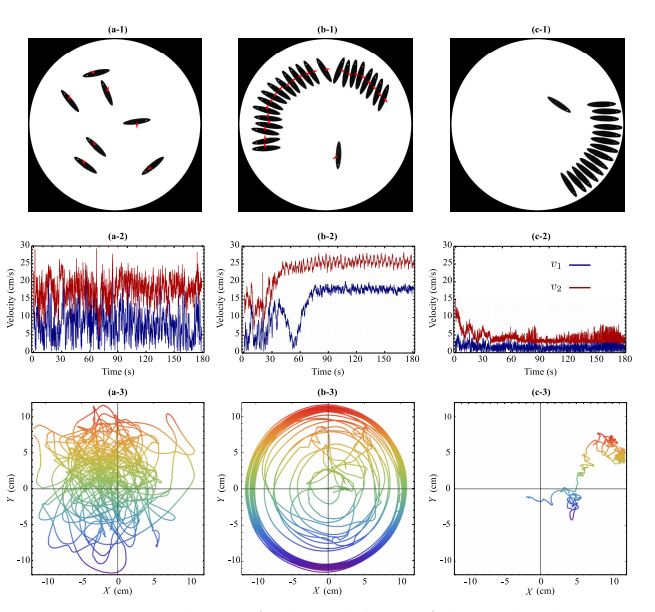
These guys make their discovery using BristleBots, simple automatons made from a toothbrush head and a cellphone vibrator motor. Put a few of these into a circular enclosure and they wander around at random.
But when Giomi and co increased the number of BristleBots, they began to self-organise into things like swirling swarms. The transition from disorder to order is triggered only when the density reaches some threshold. They’ve posted a video of their experiment here.
Giomi go on to simulate and reproduce the same behaviour using a computer model of their BristleBots.
Of course, there is significantly more to this situation than the random motion of dumb automatons. The BristleBots are able to detect and react to aspects of their environment in the sense that they change direction when they bounce off the confining walls and off each other.
It is this factor–the ability to interact with the environment and other BristleBots in the simplest manner–that leads to the self-organised behaviour.
The idea that the interaction between moving objects and their environment can lead to intelligent-like behaviour is by no means new. One interesting example is a seemingly intelligent blob of oil that is able to navigate its way through a maze.
This intelligence is merely an illusion. The trick here is to realise that the solution to the maze is encoded in its structure. So by placing a chemical at the centre of the maze, this creates a chemical gradient that the blob follows using a simple chemical reaction.
But the important point is that this mechanism allows the blob to extract the solution from its environment.
At the moment, the BristleBot behaviour and the environment in which they are confined are both relatively simple. However, it’s not hard to imagine the Bristlebots demonstrating more intelligent-like behaviour by interacting together in more complex environments.
An interesting question is whether there are any rules that govern the kinds of collective behaviours that emerge; whether emerging behaviour can be engineered in a reproducible way.
For example, would it be possible to create an environment in which BristleBots end up building a city-like structure with interconnecting tunnels and caverns? Termites do it so it’s not beyond the realms of possibility that a swarm of Bristlebots in an appropriate environment could end up pushing sand or Lego bricks around ina way that forms a termite mound-like structure.
At the heart of all this is the fundamental question of the nature of intelligence itself. We humans think of ourselves as intelligent beings but how much of this is the result of simple interactions with the environment that we find ourselves in.
The message from termites, oil blobs and BristleBots is probably much more than we think.
Ref: arxiv.org/abs/1302.5952: Swarming, Swirling And Stasis In Sequestered BristleBots
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Google DeepMind’s new generative model makes Super Mario–like games from scratch
Genie learns how to control games by watching hours and hours of video. It could help train next-gen robots too.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.