A tiny four-winged robotic insect flies more like the real thing
Many insects are powerful, agile flyers. One reason is that most have four wings, which gives them fine control over their direction of flight and their orientation through pitch, roll, and yaw adjustment.
In recent years, aerodynamicists, engineers, and roboticists have attempted to copy insect-like flight by building tiny flying robots. The main thing they’ve discovered is just how difficult this is.
One of the smallest flying machines ever built was called RoboBee; it was propelled by two flapping wings, each independently powered by its own tiny actuator. Indeed, RoboBee was only possible thanks to the development of these tiny actuators, each weighing just 25 millgrams.
But there was a problem. In theory, RoboBee’s two flapping wings ought to have been able to generate all the forces necessary for controlled flight. In practice, however, the machine was unable to generate forces powerful enough to control yawing, so it often waggled uncontrollably.
A better design would have been an insect-scale vehicle that had four flapping wings, just like real insects. But this would only have been possible if actuators were significantly lighter.
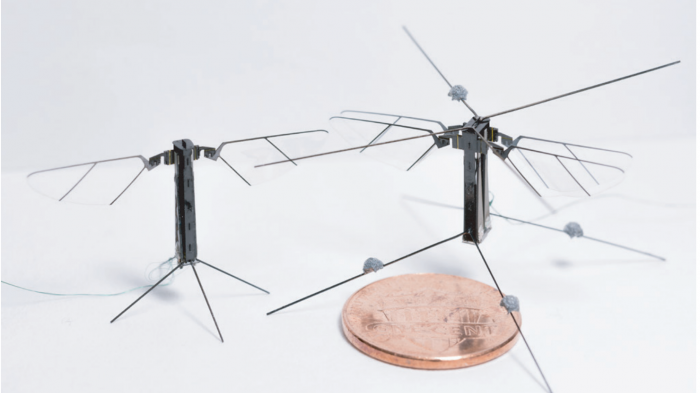
Enter Xiufeng Yang and pals from the University of Southern California in Los Angeles. These guys have developed actuators that are half the weight of previous versions. They used four of them to build a robot with four flapping wings, each with a span of just 33 milimeters. The result is an insect-like flying machine called Bee+. It’s capable of perching, landing, following a path, and avoiding obstacles.
The breakthrough is based on a clever piece of engineering. The actuators in the 2013 RoboBee were of a type called bimorphs. These are cantilevers made of two layers of piezoelectric material separated by a passive layer. The piezoelectric layers alternately contract, forcing the cantilever to bend back and forth. This motion drives the flapping of a wing.
These actuators are simple, small, and light, making them perfect for insect-like flight. The RoboBee’s two bimorph actuators weigh just 50 milligrams, a significant fraction of the device’s total mass of 75 milligrams.
But Yang and co have found a way to make them even lighter using an actuator design called a unimorph. Instead of two layers of piezoelectric material, a unimorph uses a single strip attached to a passive layer. The repeated contraction of the piezoelectric layer causes the cantilever to bend. And the movement of the tip of the cantilever drives the flapping of a wing.
This single-layer design makes the actuators significantly lighter. Indeed, the four unimorph actuators weigh only 56 milligrams, just a few grams more than two bimorphs. What’s more, the unimorph actuators simplify the assembly process. “The novel design significantly reduces the complexity of the fabrication process and the statistical frequency of assembling errors compared to that of the two-wing robots,” say Yang and co
And since the total weight of the vehicle is 95 milligrams with four wings, the wing-loading is significantly less than for RoboBee. That reduces the forces acting on the actuators and increases their life span. “The proposed approach has numerous advantages in terms of weight, dimensions, aerodynamics, control and fabrication,” say the team.
One shortcoming of Bee+ (and other insect-like flyers like RoboBee) is that it must be powered via a tether. This allows Yang and co to demonstrate its flying capability without worrying about the separate challenge of energy storage. Others have demonstrated robotic insects powered by laser beams. But onboard power is still a considerable challenge.
You can watch Bee+ going through its paces here.
That’s interesting work showing how progress in insect-like robots depends crucially on engineering advances.
Indeed, more advances are desperately needed. Bee+ may be inspired by insects, but at 95 milligrams, it is a behemoth compared with the real creatures. A bumblebee, for example, weighs about a 10 milligramsS and is self-powered to boot.
So engineers will need to reduce the size and weight of their machines by at least an order of magnitude, and that’s before considering the problem of power storage, which is even more intractable. For that reason, it may be some time before we see robots with truly insect-like capabilities.
Ref: arxiv.org/abs/1905.02253 : Bee+ : A 95-mg Four-Winged Insect-Scale Flying Robot Driven by Twinned Unimorph Actuators
Deep Dive
Humans and technology
Building a more reliable supply chain
Rapidly advancing technologies are building the modern supply chain, making transparent, collaborative, and data-driven systems a reality.
Building a data-driven health-care ecosystem
Harnessing data to improve the equity, affordability, and quality of the health care system.
Let’s not make the same mistakes with AI that we made with social media
Social media’s unregulated evolution over the past decade holds a lot of lessons that apply directly to AI companies and technologies.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.