Speed and agility are hallmarks of the cheetah: the big predator is the fastest land animal on earth, able to accelerate to 60 miles per hour in just a few seconds. As it ramps up to top speed, a cheetah pumps its legs in tandem, bounding until it reaches a full gallop.
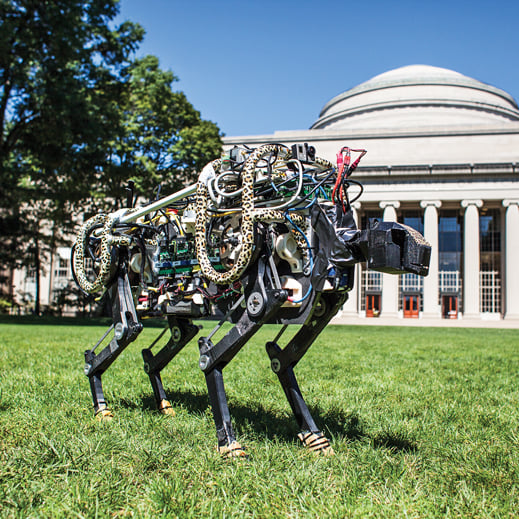
Now MIT researchers have captured that gait in an algorithm that they’ve successfully implemented in a robotic cheetah—a sleek, four-legged assemblage of gears, batteries, and electric motors that weighs about as much as its feline counterpart. The team recently took the robot for a test run on MIT’s Killian Court, where it bounded across the grass at a steady clip.
In experiments on an indoor track, the robot sprinted at up to 10 miles per hour and continued to run after clearing a hurdle. The MIT researchers estimate that the current version of the robot may eventually reach speeds of up to 30 miles per hour.
The key to the bounding algorithm is in programming each of the robot’s legs to exert a certain amount of force in the split second during which it hits the ground: in general, the faster the desired speed, the more force must be applied to propel the robot forward. Sangbae Kim, an associate professor of mechanical engineering, hypothesizes that this force-control approach to robotic running is similar, in principle, to the way world-class sprinters race.
“Many sprinters, like Usain Bolt, don’t cycle their legs really fast,” Kim says. “They actually increase their stride length by pushing downward harder and increasing their ground force, so they can fly more while keeping the same frequency.”
Kim says that the force-based approach enables the cheetah-bot to handle rougher terrain, such as a grassy field. In treadmill experiments, the robot coped well with slight bumps in its path, maintaining its speed even as it ran over a foam obstacle.
“Most robots are sluggish and heavy, and thus they cannot control force in high-speed situations,” Kim says. “That’s what makes the MIT cheetah so special: you can actually control the force profile for a very short period of time, followed by a hefty impact with the ground, which makes it more stable, agile, and dynamic.”
Kim and his colleagues presented details of the bounding algorithm at the IEEE/RSJ International Conference on Intelligent Robots and Systems in Chicago.
Keep Reading
Most Popular
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
The problem with plug-in hybrids? Their drivers.
Plug-in hybrids are often sold as a transition to EVs, but new data from Europe shows we’re still underestimating the emissions they produce.
Google DeepMind’s new generative model makes Super Mario–like games from scratch
Genie learns how to control games by watching hours and hours of video. It could help train next-gen robots too.
How scientists traced a mysterious covid case back to six toilets
When wastewater surveillance turns into a hunt for a single infected individual, the ethics get tricky.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.